Spin Transport and Control Systems Project
Spin Transport and Control Systems Project investigated the control, measurement, and theoretical modeling of spin systems at the nanoscale. Originating from the challenges of magnetic resonance force microscopy (MRFM), the project developed novel approaches to spin detection using high-quality microcantilevers, real-time feedback, and heterodyne digital control.
A core contribution of the project is the theory of separative magnetization transport—a framework for modeling spin behavior in spatially varying fields as a separative process, akin to thermodynamic transport. This theoretical work was complemented by the design of a maintainable, low-barrier instrumentation architecture using single-board microprocessor-FPGA systems. These systems unified control, lock-in amplification, spectral analysis, and signal generation within a single programmable device, dramatically reducing complexity and cost for experimental setups.
Key outcomes include:
- A separative model of magnetization transport applicable to spin imaging
- A real-time heterodyne control system deployable on embedded FPGA hardware
- Generalizable tools for precision feedback control of harmonic oscillators
This project bridged physics, mechanical engineering, and computation to enable scalable spin-based instrumentation, and laid the groundwork for my subsequent work in control systems and real-time computing.

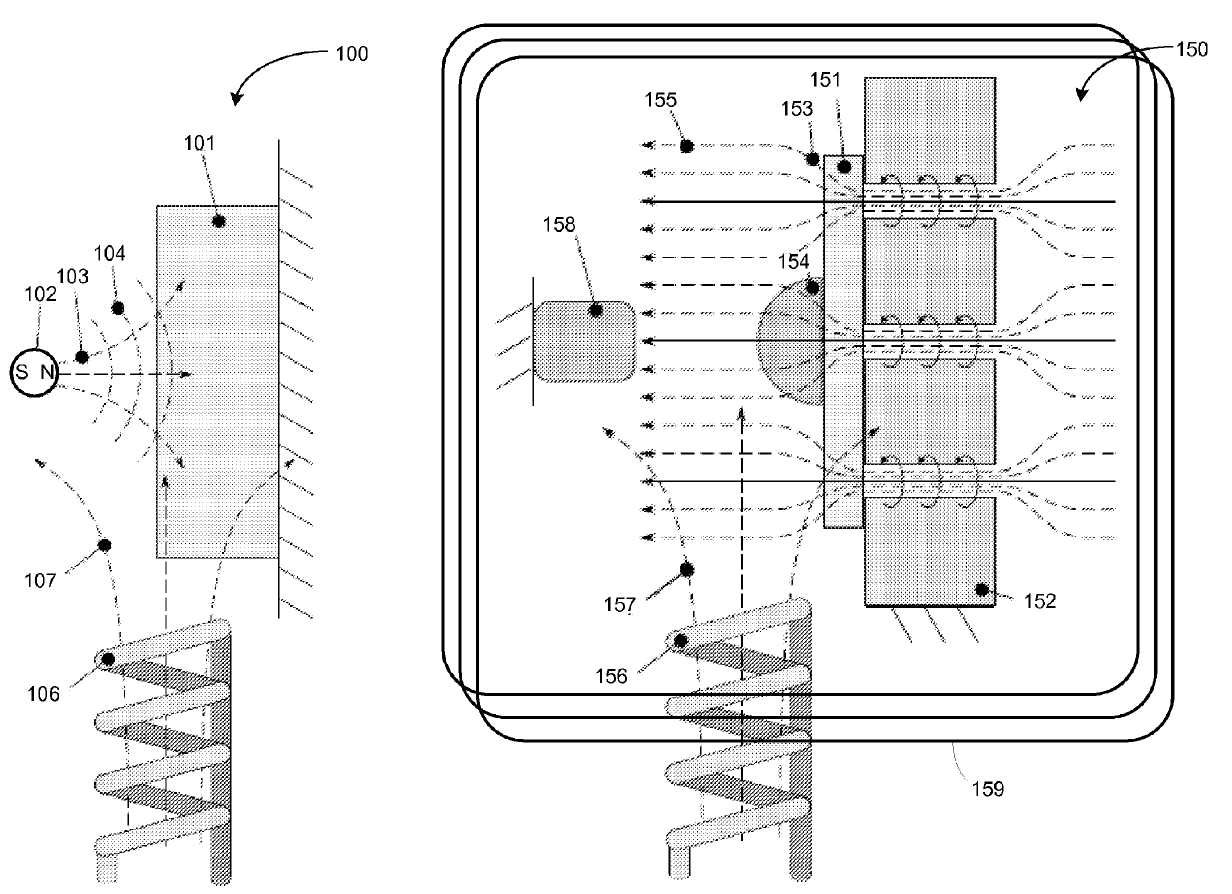
A block diagram of the cantilever feedback control loop with heterodyne control. The MRFM signal is detected by the microcantilever G, which is measured to have the position q. The feedback loop includes the heterodyne controller, which downmixes the signal, applies optimal control with an amplitude command and phase compensation, and upmixes the signal before being fed back via the control coil. (Picone et al., 2017)
Publications
- Sidles, John A., Joseph L. Garbini, Rico A.R. Picone, and Jonathan P. Jacky. "Method and System for Concentrating Magnetization of Nuclear Spins". US9810758B2.

- Picone, Rico A. R., Solomon Davis, Cameron Devine, Joseph L. Garbini, and John A. Sidles. "Instrumentation and Control of Harmonic Oscillators via a Single-Board Microprocessor-FPGA Device". Review of Scientific Instruments 88, no. 4: 045108.
- Picone, Rico A.R., John A. Sidles, and Joseph L. Garbini. "Application of a Thermodynamical Framework for Transport Analysis to the Derivation of Dirac's Value Function". ArXiv e-prints.
- Picone, Rico A.R., Joseph L. Garbini, and John A. Sidles. "Modeling Spin Magnetization Transport in a Spatially Varying Magnetic Field". Journal of Magnetism and Magnetic Materials 374, no. 0: 440 - 450.
- Picone, Rico A.R.. "Separative Magnetization Transport: Theory, Model, and Experiment".
- Sidles, John A., Joseph L. Garbini, Jonathan P. Jacky, and Rico A. R. Picone. "Quantum Spin Microscopy's Emerging Methods, Roadmaps, and Enterprises". Proceedings of 52nd ENC.
- Sidles, John A., Joseph L. Garbini, Jonathan P. Jacky, Rico A. R. Picone, and Scott A. Harsila. "Elements of Naturality in Dynamical Simulation Frameworks for Hamiltonian, Thermostatic, and Lindbladian Flows on Classical and Quantum State-Spaces". ArXiv e-prints.
- Picone, Rico A.R.. "Investigating the effects of polarizing diffusion in magnetic resonance force microscopy".
Grants
-
Nanoscale Spin Hyperpolarization and Imaging
This was a NanoMRI collaboration between Cornell University's Professor John Marohn (PI), the University of Washington, and Saint Martin's University.
Dr. Picone's Role: Co-Principal Investigator
Status: Awarded
Amount Requested: $485,000.00
Amount Awarded: $485,000.00
SMU Amount: $20,829.00
Funding Agency: U.S. Army Research Office
Submission Date: January 2017
Research Themes
Feedback Control Systems
Designing systems that regulate themselves in the presence of uncertainty, noise, and delay. This theme focuses on classical and modern control theory, with applications in mechatronics, instrumentation, and robotics. Work includes system identification, nonlinear control, and real-time computing, often extending into philosophical questions about autonomy and agency.
NanoMRI
Pushing the limits of instrumentation and control at the nanoscale to image and manipulate spin systems. This theme encompasses earlier research on separative magnetization transport, spin dynamics, and feedback control in MRFM. It represents the foundations of your technical expertise in real-time measurement, physical modeling, and experimental design at the quantum-classical interface.